ZIPC Tools
ZIPC GARDEN
自動運転システム安全性論証に基づく
「シナリオベース開発プロセス」を実現

ZIPC GARDEN®とは
「ZIPC GARDEN」は、自動運転システムが直面する様々な外的要因を体系的に分析・整理し、網羅的かつ効率的にシナリオを生成して、シナリオ検証を実現する「シナリオベース開発プラットフォーム」です。
「ZIPC GARDEN」を活用することにより、過去の経験やノウハウ・蓄積した走行データをDX化(シナリオとして蓄積)して、効果的に活用することにより、効率的かつ高品質なシステム開発の実現を支援します。
本製品は、株式会社J-QuAD DYNAMICSおよび株式会社NTTデータとの業務提携による自動運転・先進安全支援領域の共同研究成果です。
ZIPC GARDEN®概要
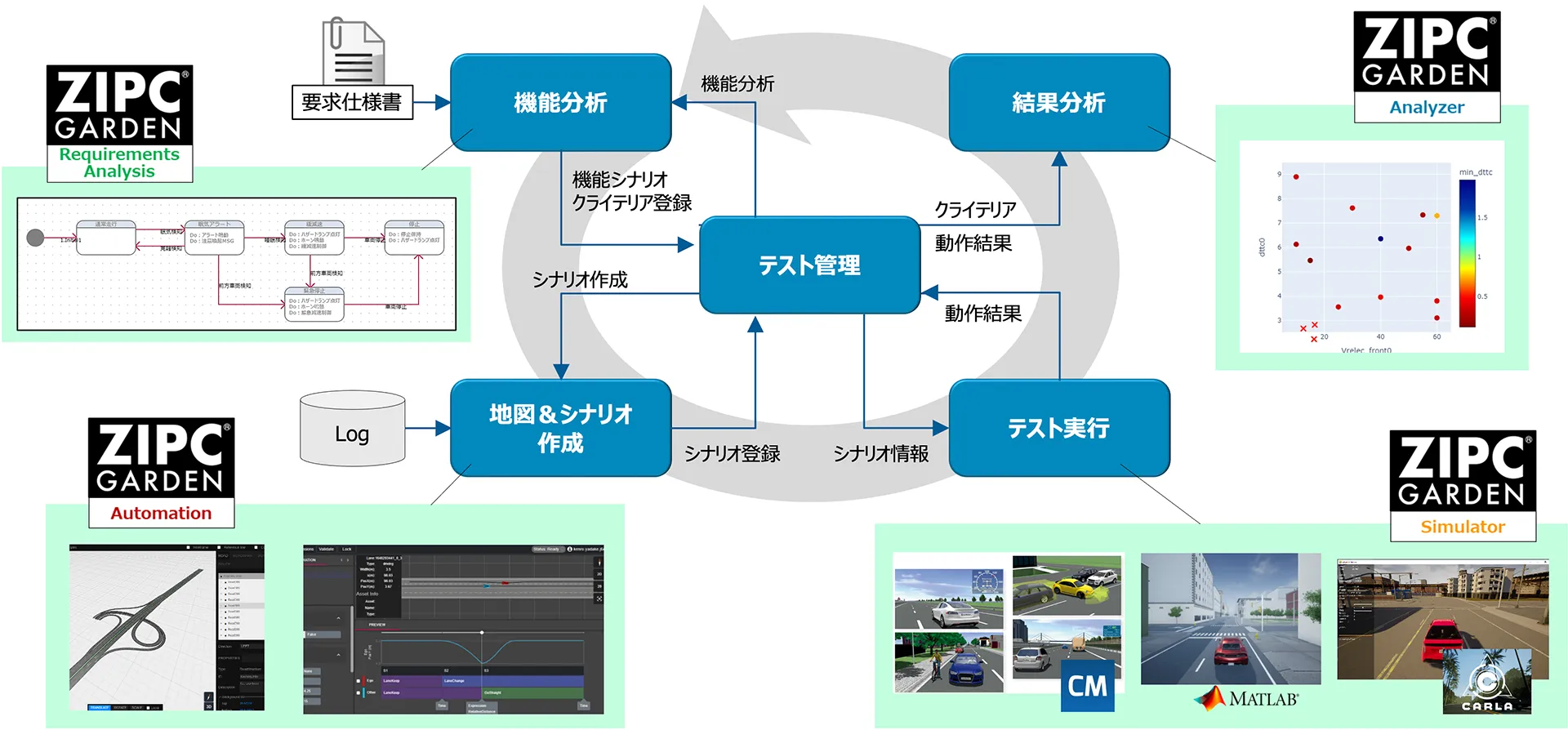
「ZIPC GARDEN」は、4つのパッケージによりシナリオ検証をトータル支援します。
自動運転・先進安全システムの開発は、①ODD(Operational Design Domain:運行設計領域)を決定して実現したい機能を定義(機能分析)、②実現したい機能が意図通りに実現できているか・安全性に問題ないか、を確認するために地図とシナリオを定義(地図&シナリオ作成)、③定義した内容に基づいて検証(テスト実行)、④検証結果の分析(結果分析)、分析結果に応じて機能開発へ反映、という流れ(①~④:シナリオ検証ループ)により、機能を作り込みます。
「ZIPC GARDEN」では、このシナリオ検証ループにおける各業務について、支援します。

ZIPC GARDEN® Requirements Analysis
「ZIPC GARDEN Requirements Analysis」は、システムの振舞い(機能と機能遷移)を状態遷移モデルで可視化し、システムの振舞いに対する外部要因をツリーモデルで分析することにより、抜け漏れないシナリオ作成を支援します。
ZIPC GARDEN® Automation
「ZIPC GARDEN Automation」は、実走行データや論理化したシナリオを定義して、具体シナリオを自動生成します。具体シナリオ生成はパラメータスイープ・パラメータ探索機能により、設計者の意図に沿ったシナリオの効率的な作成を支援します。また、実走行データを基にシナリオ生成することにより、実走行で問題があったシナリオを基に類似シナリオを増幅することができます。作成したシナリオはOpenDRIVE/OpenSCENARIO[注1]として出力可能です。
[注1]
・「OpenDRIVE」は、道路網のロジックを記述するためのオープンフォーマット仕様です。
・「OpenSCENARIO」は、仮想テストドライブ シミュレーションで使用されるシナリオの動的コンテンツを記述するためのオープンフォーマット仕様です。
・「OpenDRIVE/OpenSCENARIO」は、ASAM(Association for Standardization of Automation and Measurement systems:自動車業界内で標準化を積極的に推進している非営利団体)により標準化が推進されており、国際標準規格になっています。
ZIPC GARDEN® Simulator
「ZIPC GARDEN Simulator」は、AD/ADASシステムのシミュレータのテスト実行を管理する機能です。「ZIPC GARDEN Automation」で作成したシナリオ情報に従い、シミュレータを制御して、シミュレーション結果を受け取ります。対応するシミュレータは順次拡大予定です。
ZIPC GARDEN® Analyzer
「ZIPC GARDEN Analyzer」は、「ZIPC GARDEN Automation」で作成したシナリオ情報と「ZIPC GARDEN Simulator」でシミュレータから取得したログ情報を読込み、シナリオに対するカバレッジを可視化するツールです。
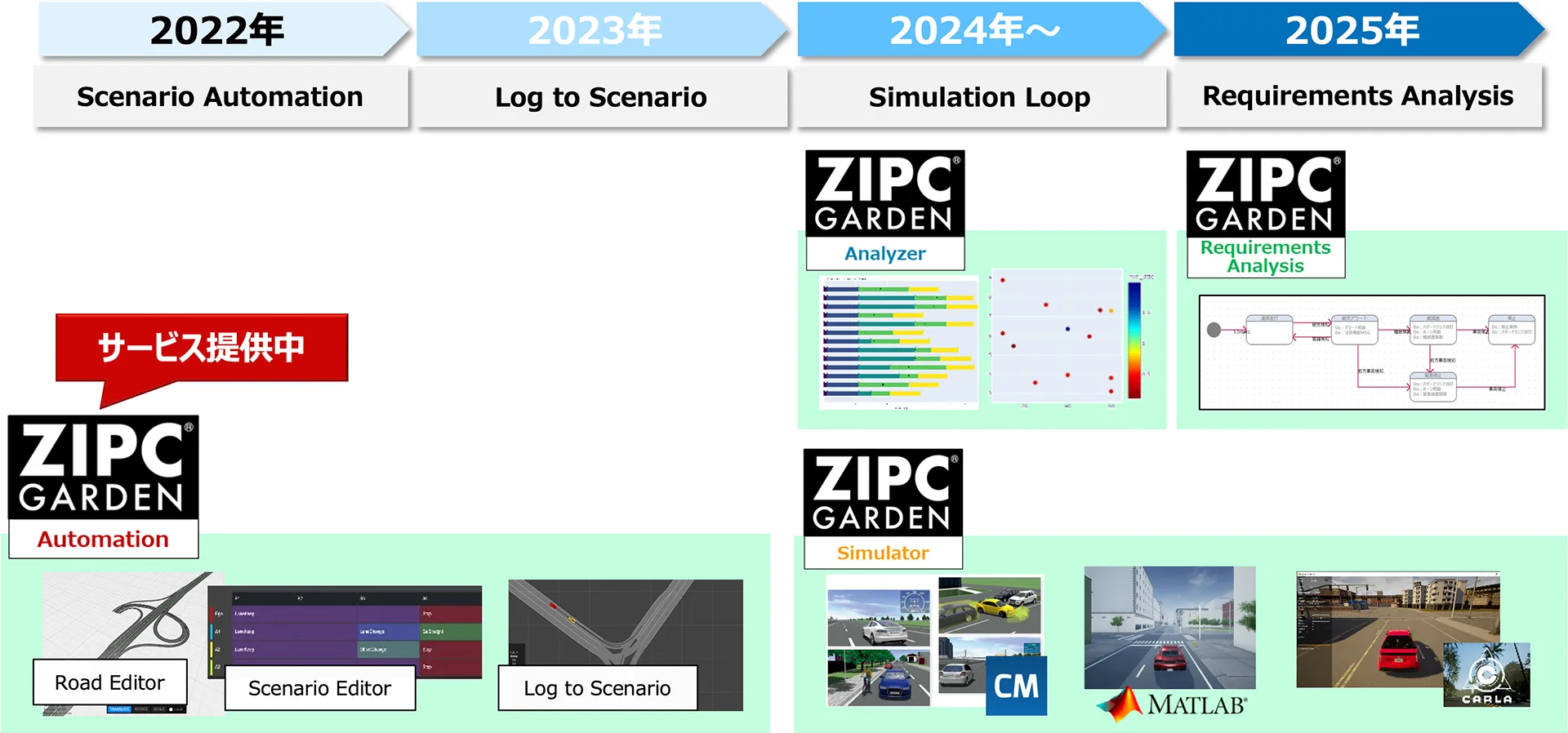
ZIPC GARDEN®ロードマップ
シナリオ作成を支援する「ZIPC GARDEN Automation」は、2022年4月からサービス提供中であり、継続的な機能改善・拡充を図っています。
次のステップとして、「ZIPC GARDEN Simulator」、「ZIPC GARDEN Analyzer」を順次リリースし、シナリオ検証ループの早期実現を目指します。
CONTACT
導入に関する質問やご相談、サポートに関することなど、まずはお気軽にご相談ください。