ニュースリリース
News Release

自動運転システム開発を促進する検証基盤ソフトウェアをオープンソース化
~自動運転システム検証基盤ソフトウェア
「GARDEN ScenarioPlatform」のソースコードを無償公開~
株式会社NTTデータ オートモビリジェンス研究所
株式会社NTTデータ オートモビリジェンス研究所(本社:神奈川県横浜市、代表取締役社長 CEO:中井 章文 以下、ARC(アーク))は、「自動運転システム検証・開発プラットフォーム」等の次世代モビリティ社会に必要な機能群のソフトウェア化を推進する研究開発プロジェクト「GARDEN」における成果として、オープンソースソフトウェア(以下、OSS)である「GARDEN ScenarioPlatform」(ガーデン シナリオプラットフォーム)を2021年6月18日にリリースしました。
「GARDEN ScenarioPlatform」のソースコードを無償公開することで、自動運転システム制御に関わるソフトウェア開発を進めている自動車メーカー・サプライヤ等の関係者に広く改修・活用いただき、自動運転システムの開発促進に貢献することを目的としています。
背景・目的
自動車産業・交通社会におけるCASE時代を迎えた今日、自動車業界各社においては自動運転の実現に向けた研究開発が精力的に進められていますが、その安全性の確保が大きな課題として存在しており、自動運転システムの根幹とも言えるソフトウェア開発においても、安全性検証の重要性が増しています。
NTTデータグループの自動車ソリューション事業R&DセンターであるARCでは、今回、自動車メーカー・サプライヤ等での自動運転ソフトウェア開発における、シナリオベース開発プロセスを用いた有効かつ効率的な安全性検証を実現するために、研究開発プロジェクト「GARDEN」の成果の一部をOSS化した自動運転システム検証基盤ソフトウェア「GARDEN ScenarioPlatform」として無償公開することとしました。
GARDEN ScenarioPlatformの機能概要
GARDEN ScenarioPlatformは、自動運転ソフトウェア開発におけるシナリオベース開発プロセスをサポートし、自動運転ソフトウェアの機能動作シミュレーションにて実行可能なシナリオを生成します。
GARDEN ScenarioPlatformはシナリオベース開発プロセスにおいて、FOT(フィールド実証実験)等から得られる走行データを分析してシナリオを抽出し、統計データからパラメータの範囲を特定することが出来るようになります。また、専門知識から得られた検証シナリオについては、抽象度の高いシナリオ記述からシミュレーション実行可能な具体的なシナリオへ段階的記述することが可能です。
シミュレーションにおいては、「CARLA」を活用し「Autoware」や「Simulink」との接続実績があります。また、シナリオベース開発における国際標準フォーマット「OpenSCENARIO」「OpenDRIVE」に対応した既存シミュレータとの連携も想定しています。
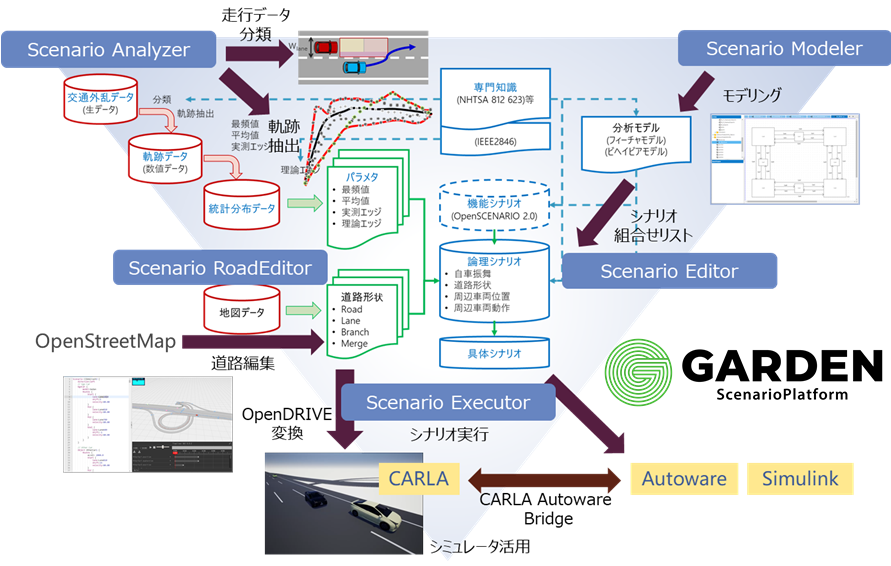
図:GARDEN ScenarioPlatformの機能概要
利用方法
本OSSの初回バージョンである「GARDEN ScenarioPlatform acacia」(アカシア)のソースコードをGitHubリポジトリにて無償公開し、NewBSDライセンスに基づき利用許諾します。利用者はソースコードに添付のライセンス条項に同意の上で、利用・改修等を行うことができます。
ソースコードの入手および利用手順のご確認・技術的なお問い合わせは、以下Webサイトよりお願い致します。
GARDENプロジェクトURL:https://open-garden.github.io/garden/
今後の予定
今後は、本OSSによる自動運転システムの開発促進に賛同する事業者との連携によって本OSSの利活用を推進するとともに、継続してバージョンアップ版をリリースする予定です。
※本リリースに記載されている内容は予告無く変更することがあります。
※「GARDEN ScenarioPlatform」は、株式会社NTTデータ オートモビリジェンス研究所の商標です。
※その他の商品名、会社名、団体名は各社の商標または登録商標です。
本報道に関するお問い合わせ先
株式会社NTTデータ オートモビリジェンス研究所
戦略推進部 中島・本松
TEL:045-473-2091 EMAIL:info@zipc.com URL:https://www.zipc.com/
CONTACT
導入に関する質問やご相談、サポートに関することなど、まずはお気軽にご相談ください。